Nicholas Carlevaris-Bianco
nickcarlevaris@gmail.com
Google Scholar
Publications
My research focuses on perception for mobile robotics, using tools from computer vision, machine learning, and statistical signal processing for map building, navigation and scene understanding. I am specifically interested in developing algorithms that are robust to dynamic changes in the environment, with the end goal of helping to enable long term autonomy. I was a PhD Candidate in Electrical Engineering: Systems at the University of Michigan and a Graduate Student Research Assistant in the Perceptual Robotics Laboratory.
Journal
University of Michigan North Campus Long-Term Vision and Lidar DatasetNicholas Carlevaris-Bianco, Arash K. Ushani, and Ryan M. Eustice,
International Journal of Robotics Research, 2016. (In Press). [PDF] [BibTeX]
Long-Term Mapping Techniques for Ship Hull Inspection and Surveillance Using an Autonomous Underwater Vehicle
Paul Ozog, Nicholas Carlevaris-Bianco, Ayoung Kim and Ryan M. Eustice,
Journal of Field Robotics, Special Issue on Safety, Security and Rescue Robotics, 2015. [PDF] [BibTeX]
Generic Node Removal for Factor-Graph SLAM
Nicholas Carlevaris-Bianco, Michael Kaess, and Ryan M. Eustice,
IEEE Transactions on Robotics, 2014. [PDF] [BibTeX]
Conference and Workshop
Continuous-Time Estimation for Dynamic Obstacle TrackingArash K. Ushani, Nicholas Carlevaris-Bianco, Alexander G. Cunningham, Enric Galceran and Ryan M. Eustice,
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, September 2015. [PDF] [BibTeX]
Learning Visual Feature Descriptors for Dynamic Lighting Conditions
Nicholas Carlevaris-Bianco and Ryan M. Eustice,
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, September 2014. [PDF] [BibTeX]
Conservative Edge Sparsification for Graph SLAM Node Removal
Nicholas Carlevaris-Bianco and Ryan M. Eustice,
In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, June 2014. [PDF] [BibTeX]
Long-Term Simultaneous Localization and Mapping with Generic Linear Constraint Node Removal
Nicholas Carlevaris-Bianco and Ryan M. Eustice,
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, November 2013. [PDF] [BibTeX]
Generic factor-based node marginalization and edge sparsification for pose-graph SLAM
Nicholas Carlevaris-Bianco and Ryan M. Eustice,
In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, May 2013. [PDF] [BibTeX]
Learning temporal co-observability relationships for lifelong robotic mapping
Nicholas Carlevaris-Bianco and Ryan M. Eustice,
IROS Workshop on Lifelong Learning for Mobile Robotics Applications, Vilamoura, Portugal, October 2012. [PDF] [BibTeX]
Visual localization in fused image and laser range data
Nicholas Carlevaris-Bianco, Anush Mohan, James R. McBride and Ryan M. Eustice,
In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, September 2011. [PDF] [BibTeX]
Multi-view registration for feature-poor underwater imagery
Nicholas Carlevaris-Bianco and Ryan M. Eustice,
In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, May 2011. [PDF] [BibTeX]
Initial results in underwater single image dehazing
Nicholas Carlevaris-Bianco, Anush Mohan and Ryan M. Eustice,
In Proceedings of the IEEE/MTS OCEANS Conference and Exhibition, Seattle, WA, September 2010. [PDF] [BibTeX]
Thesis
Long-Term Simultaneous Localization and Mapping in Dynamic EnvironmentsNicholas Carlevaris-Bianco
PhD thesis, Department of Electrical Engineering and Computer Science, University of Michigan, Ann Arbor, MI, January 2015. [PDF] [BibTeX]
Code & Data
Generic Linear Constraint Node Removal
The generic linear constraint (GLC) framework provides a method to remove nodes from SLAM graphs. This can be used for graph maintenance and to reduce computational complexity during long term SLAM. GLC produces a new set of factors over the elimination clique given only the existing factors as input. GLC works in graphs with less-than-full DOF constraints (e.g., bearing-only, range-only.), and avoids inconsistency found in methods based on measurement composition.My GLC node removal code is implemented and available for download within Michael Kaess's iSAM repository available at: http://people.csail.mit.edu/kaess/isam/
Please email me (nickcarlevaris@gmail.edu) with any questions or comments.
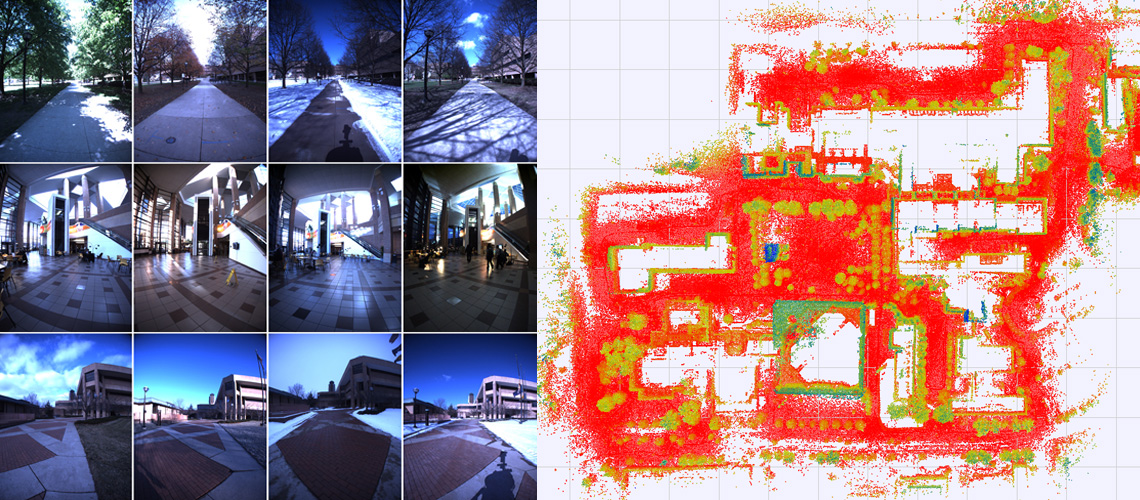
The University of Michigan North Campus Long-Term Vision and LIDAR Dataset
I collected this dataset to evaluate long-term SLAM algorithms during my PhD work. It contains omni-directional imagery, 3D lidar and odometry data for 27 runs around campus over the course of a year.The dataset can be downloaded from: http://robots.engin.umich.edu/nclt
Past Projects
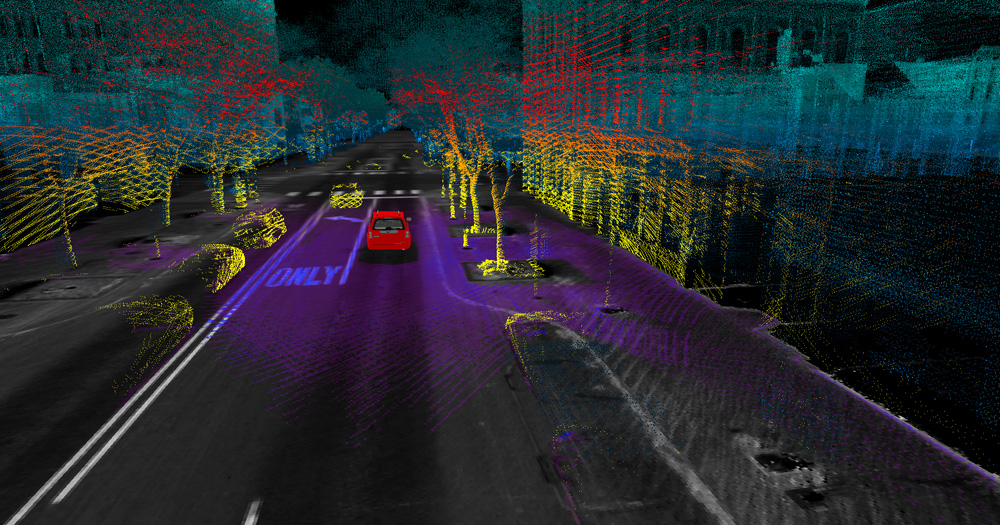
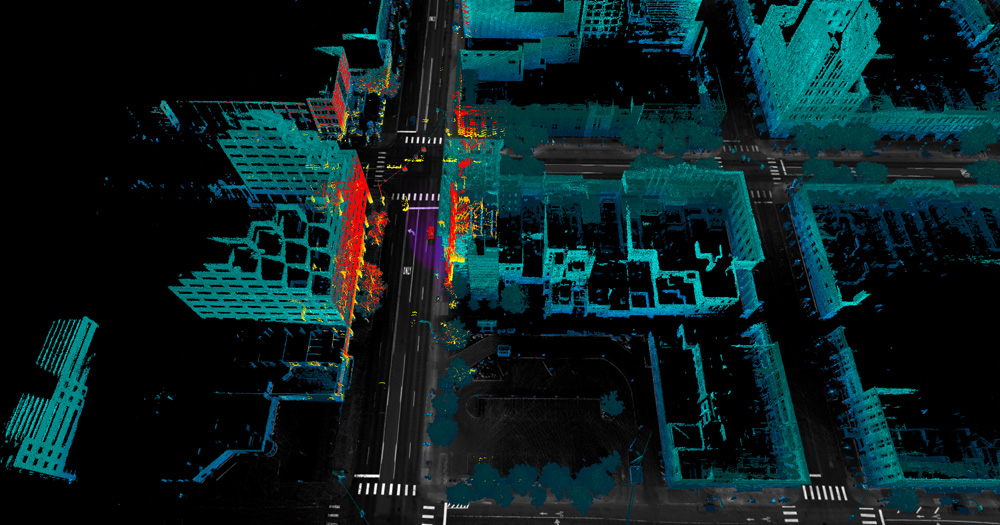
Next Generation Vehicle
PeRL is working on the "next generation" autonomous vehicle project — a collaboration with Edwin Olson's April Lab, Ford Motor Company and State Farm. Within the team, I worked on tools for building the prior maps and laser-based obstacle detection and tracking.

Long-Term Mapping and Navigation
For my dissertation I worked on algorithms for long-term robotic mapping and navigation in dynamic environments.See the Publications and Code sections for more information.
Naval Engineering Education Center (NEEC)
The goal of the NEEC program was to train graduate and undergraduate engineers for careers in the Navy. I worked with the NEEC students the first two years of the project. In the first year we built a robotic system on a Segway. The second year focused on autonomously landing a quadrotor on top of a moving Segway. This served to simulate landing a helicopter on an aircraft carrier. For more info check out the PeRL NEEC page.



PeRL's Autonomous Underwater Vehicles
PeRL operates two heavily modified Ocean-Server Iver2 autonomous underwater vehicles. I worked on system development, state estimation and visualization. For a couple of summers I got to head out with the group for field testing and data collection.